Tin tức
Chú thích: Đo khoảng cách với cảm biến khoảng cách VL53L1X của ST

Tạo hình ảnh "màu" không phải là mới. Cảm biến Kinect của Microsoft đã giới thiệu các nhà phát triển để có được thông tin không gian: một mẹo mà STMicroelectronics hiện có thể quản lý thông qua các bộ phận cảm biến khoảng cách dựa trên laser, rất phù hợp với các bộ cảm biến hạ cánh bay không người lái, bộ cảm ứng khoảng cách và các nữ trang khác.
Tất cả trong một…
Không giống như cảm biến được sử dụng trong Kinect, cảm biến của ST là "một chiều". Cửa sổ quang ở phía trên của chip hoạt động như kính ngắm và phát, trong khi khoảng cách tới “đối tượng” ở phía trước máy dò được trả về như một giá trị một chiều (nghĩ rằng: cách vật gì đó cách tôi 50cm).
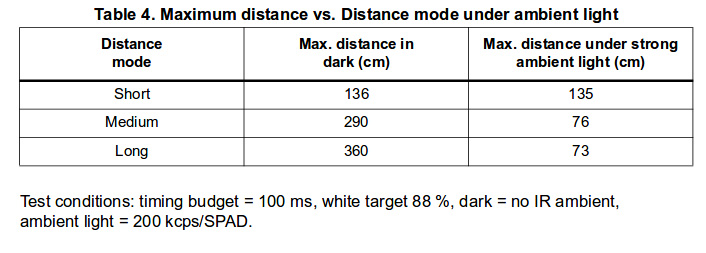
Hơn nữa, việc sử dụng công nghệ laser làm cho hệ thống gần như hoàn toàn độc lập với vật liệu đích - các vấn đề liên quan đến màu sắc được biết đến từ các thành phần IR cổ điển không nên xảy ra ở đây.
Kết nối Host-Sensor được thực hiện thông qua bus I2C: thật đáng buồn, ST không lộ ra một bộ chọn địa chỉ, do đó hạn chế bạn đến một bộ cảm biến trên mỗi bộ điều khiển bus. Giao thức truyền thông thực tế được mô tả trong một tài liệu riêng biệt: như ST thích thay đổi lược đồ URL của nó, chỉ cần google cho UM2356 để tìm nó - (nhưng "trong khi không tiết lộ bất kỳ bộ chọn địa chỉ nào trong phần cứng, có thể chọn địa chỉ thông qua các lệnh trong khi khởi động cảm biến", theo một bình luận được đăng dưới đây bởi Martin Palsson, người có thêm chi tiết (cuộn xuống)).
Hơn nữa, một trình điều khiển được viết bằng C được tạo sẵn để hỗ trợ người triển khai.
Trong khi mức tiêu thụ hiện tại là vừa phải trong phạm vi nhỏ hơn 20mA khi hoạt động, người dùng phải nhận thức được điện áp cung cấp tối đa là 3V5. Điều này làm cho việc tích hợp hệ thống vào các bus 5V I2C trở nên khó khăn - một shifter cấp được tạo thành từ hai FET là một cách giải quyết (xem directionalLevelShiftervà lưu ý áp dụng).
Hiệu chỉnh tôi!
Hầu hết các cảm biến đòi hỏi phải sửa đổi thiết kế vỏ máy: không cần cắt bỏ "để nhìn ra ngoài", tất cả các loại vấn đề lạ xảy ra. ST đơn giản hóa điều này bằng một thói quen hiệu chuẩn chuyên dụng, cần được chạy trên mọi thiết bị trong nhà máy. Điều này cũng loại bỏ sự khác biệt quang học riêng lẻ trong “cửa sổ”, và giải thích cho bất kỳ thay đổi nào gây ra bởi sự phản xạ.
Một khía cạnh tốt đẹp khác là khả năng thiết lập “vùng quan tâm”. Mặc dù trường nhìn, theo mặc định, khá rộng, mảng quang có thể được điều chỉnh để hạn chế nó. Trong một sự tương đồng eery với Kinect nói trên, phạm vi phát hiện cũng được xác định trong “lớp”.
Nhược điểm duy nhất của phần này là dấu chân nhỏ bé. ST sử dụng một trường hợp không pha chì (LGA quang) mà là 4,9 × 2,5 × 1,56 mm nhỏ: trong khi các gói có thể được reflowed một cách dễ dàng, lắp nó vào một mẫu thử nghiệm bằng cách sử dụng một trạm hàn là borderline không thể.
Như với tất cả các chip mới, tính khả dụng là một vấn đề. Trên OEMsecrets, giá dao động từ 2,8 € đến 5 € với số lượng nhỏ - như thường lệ, so sánh giá là bạn của chiếc ví của bạn. Xem bên dưới!
Ing. Tam HANNA ... đã làm việc trong không gian nhúng kể từ khi PIC 16F84A nóng. Sau một vài năm về điện toán di động, công ty tư vấn của ông Tamoggemon Holding k.s. đã tập trung vào thiết kế phần cứng.
Xem thêm: Cảm biến ST ToF mở rộng phạm vi phát hiện của FlightSense lên 4m